|
|
 |
|
|
|
|
|
|
Myšlenka decentralizace automobilové sítě.
Vzpomínám si na doby Škoda 120, kdy jsem se poprvé začal trošku zajímat a vrtat v elektrice auta. Základem byla baterka, alternátor a osm keramických pojistek u nohou spolujezdce. Dvě pojistky pro tlumené světla, dvě pro potkávací světla, dvě pro dálkové světla, předposlední pojistka byla stále pod napětím a poslední pojistka po otočením klíčkem. Autorádio mělo pojistku svou přímo na kabelu napájení. Vše se ovládalo silově tlačítky a otočnými vypínači. Na opravu Vám stačil šroubovák, klíč č.10 a drátěný kartáč na čištění zarezlých kontaktu na kostře. V dnešní době úsměvné, ale v tehdejší době funkční a dostačující.
Favorit a Felicie by si po stránce elektroinstalace mohli podat ruce. Favorit po roce výroby 93 měl z velké části elektroinstalaci zaměnitelnou s Felícii. Také šlo občas vidět Škodu Favorit s kompletní přístrojovou deskou z Felicie, samozřejmě po domácku upravenou. Motor začal být řízen řídicí elektronikou, začal využívat vstřikovače, Lambda sondu a jiné čidla pro regulaci emisí a spotřeby. Silová část vozu byla ovládána pomocí relé. Objevuje se i ovládací elektronika ABS, klimatizace, ovládání oken, zamykání, alarmu a dalších. Nabídka komfortní výbavy se rozšiřuje a taky je po ni poptávka.
Propojení různých spotřebičů, elektrických výbav a kontrolních prvků se začal prudce zvyšovat. Různé prvky výbavy musely být z principu spolu svázány, aby jedna nekolidovala z druhou. Složitost elektroinstalace byla taková, že porušení kabeláže jisté výbavy mohla a většinou ovlivňovala chod i jiné výbavy nebo dokonce i chod celého auta. Dohledat se prodřené izolace kabelu, nebo poškozené části elektroinstalace bylo dlouhodobé hledání celých svazků kabelů.
Kontrolní diagnostika se poprvé objevuje s auty, kde je motor řízen řídicí jednotkou a používá kontrolu výfukových plynů pro řízení směsi paliva. Diagnostika pod názvem OBD, EOBD má kontrolovat bezchybnost řízení motoru. Pokud je problém, uloží si ho do paměti, popřípadě rozsvítí kontrolku na přístrojové desce, aby donutil řidiče jet do servisu. V servisu po připojení na diagnostiku a výčtu chyby se mohl servis dozvědět, kde mohla chyba nastat.
Abych to trošku přiblížil. Elektronika kontroluje sama sebe a zároveň signály ze snímačů a akčních členů. Vše vyhodnocuje dle uložených informací od výrobce. Těmto informacím od výrobce říkejme "tabulkové hodnoty". Pokud se cokoli začíná vychylovat z "tabulkových hodnot" uloží si danou chybu do paměti. Pokud se jedná o malou chybu jako například čidlo, které může nahradit jiným sekundárním, tak se chyba pouze uloží. Při klasické roční návštěvě servisu, kdy je jedna z prvních úkonů výčet závad diagnostikou se na tento problém přijde a opraví. Jestli je, ale chyba čidla nebo akčního členu, který nelze nahradit nebo je přímo spojen s funkčností motoru, potom se tato chyba také uloží, ale zároveň se rozsvítí kontrolka emisi či do servisu (záleží na výrobci auta), která Vás upozorňuje, že je něco špatně a je třeba neprodleně navštívit servis. U moderních aut elektronika sníží výkon motoru, aby nedošlo k jeho poškození, nebo poškození drahých částí jako katalyzátor.
Až po toto místo bychom mohli říct, že všechny automobilky šli stejnou cestou. Každý však v jiné časové ose. Teď se budu už zaměřovat blíže na značku Škoda a koncern Volkswagen.
Škoda Octavia I bylo první české auto s CAN-BUS
Podobnou složitost v zapojení jako dosahoval motor, tak začala dosahovat i přesahovat komfortní výbava vozidla. V zájmu zjednodušení montáže, snížení ceny výroby elektroinstalace i elektroniky výbavy, ale také v jednodušší dohledatelnosti poruchy je současná elektroinstalace vozidla rozdělená na části i pod části.
Pojem decentralizace.
Každá část výbavy vozidla má vlastní řídicí jednotku, která se stará o její kompletní chod včetně jejích snímačů a akčních členů. Stručně řečeno máme například řídicí jednotky motoru, ABS (ESP), Airbagů, automatické převodovky, ale také klimatizace, stahování oken a centrálního zamykání a spoustu dalších řídicích jednotek, které většina ani neví, že existují. Pojem decentralizace znamená, že žádná řídicí jednotka není hlavní a ani vedlejší. Všechny jsou na sobě nezávisle a fungují samy o sobě.
Není to ale tak jednoduché. Jednotky umí jen to, k čemu jsou určené, sbírají údaje ze svých snímačů a řídí své akční členy. Někdy je ale vhodné jednotce podat informaci ze snímače, která patří jiné řídicí jednotce. Abychom nemuseli mít dva stejné snímače, musíme tyto jednotky nějakým způsobem propojit. Proto jsou všechny jednotky napojeny na páteřní síť vozidla, aby mohli spolu mezi sebou komunikovat a vyměňovat si informace. Síť se jmenuje CAN. Pro představu to vypadá jako několik počítačů napojeny na lokální síť.
Příklad: Řídicí jednotka ABS dostává údaje ze svých čidel umístěných na kole, které snímají otáčení kola. Potřebuje to k tomu, aby měl kontrolu, zdali se kolo otáčí, jak rychle a porovnává všechny kola mezi sebou a podle toho reguluje brzdy. Tento údaj mohou využít i jiné jednotky a proto informaci vypouští na páteřní síť. Panel přístrojů (to je také řídicí jednotka) zachytí údaj ABS o pohybu vozidla. Dostane přesné údaje o rychlosti otáčení kol, které se neustále aktualizují. Panel přístrojů je schopen tyto údaje zpracovat a zobrazit podle něj aktuální rychlost vozidla. Pomocí této komunikace jsme ušetřili jedno čidlo, které by sloužilo jen pro snímání rychlosti vozu pro panel přístrojů, které bylo kdysi umístěno na převodové skříni. Také tyto údaje využívá vestavěná navigace výrobce. V případě výpadku GPS signálu družice (třeba v tunelu), navigace ví jakou rychlostí a směrem jedete.
V autě máme desítky řídicích jednotek. Většina těchto jednotek vypouští do sítě informace o své činnosti nebo o svých čidlech. Jedna síť pro celé auto by v dnešních moderních autech nestačila. Byla by zahlcená spoustou informaci a mohlo by se stát, že důležitá informace například z jednotky ESP by se nemusela dostat v čas k řídicí jednotce motoru. Mohla by se sice zvýšit rychlost sítě, ale pro většinu jednotek by byla vyšší rychlost zbytečná. Proto je síť rozdělena na několik částí.
Dělíme na část Can hnacího ústrojí, panel přístrojů, infotainment, kombi, diagnostika. Dále jsou sítě K-line a L-line.
K-line sériová komunikace vyloženě jen řídicí jednotkou motoru a převodovky s diagnostickou zásuvkou.
L-line (LIN) je obdobou komunikace CAN jen nevyžaduje k propojení jednotek dva vodiče, ale jen jeden jako například řídicí jednotka centrální elektriky s řídicí jednotkou motoru stěračů.
Can hnacího ústrojí je nejrychlejší (většinou kolem 500kb/s) a spojuje řídicí jednotky pohonu a bezpečnosti:
řídicí jednotka motoru, automatická převodovka, volič automatické převodovky, ABS (ESP), posilovač řízení, Airbag, náklon Xenonů.
Can Komfortu běží na rychlosti dostačující obsloužit veškeré jednotky, obvykle 100 - 200kb/s:
centrální elektrika, řídicí jednotky dveří, klimatizace, multifunkční volant, stěrače, dešťový a světelný senzor, elektrické sedačky s pamětí a další.
Can panel přístrojů je určen k připojení pouze samotného panelu přístrojů ke Gateway. O tom si povíme později.
Can infotaiment slouží k propojení multimediální techniky jako navigace, rádio, CD měnič nebo HF sada.
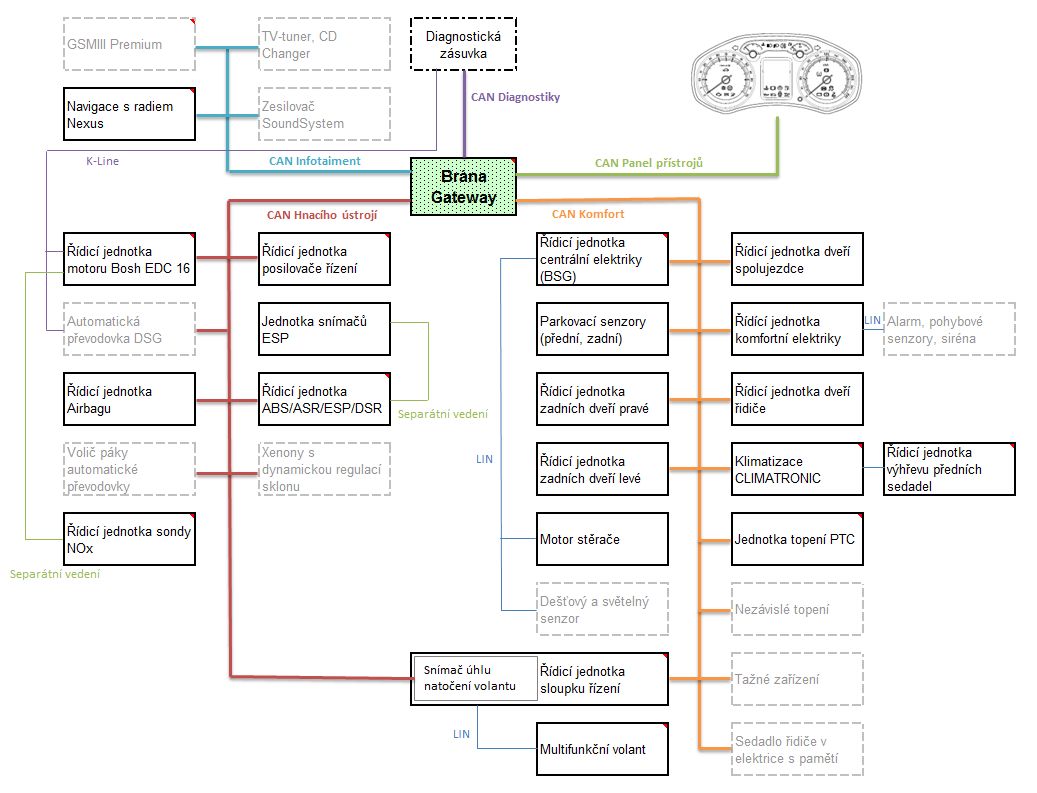
Když se na to podíváme schematicky, tak máme tři páteřní sítě Can, panel přístrojů a diagnostickou zásuvku. To vše se musí propojit, aby všechny řídicí jednotky ve voze mohli spolu řádně komunikovat. Teď bych se vrátil už ke zmíněné Gateway. Jak již název napovídá, je to brána, která propojuje všechny zmíněné sítě. Umí a řídí toho mnohem více, ale to bude další článek.
Touto jednotkou Gateway bych ukončil článek na téma decentralizace elektrické sítě v autech. Zároveň tím začínám další článek "Typy a funkce řídicích jednotek Volkswagen".
Přikládám schéma zapojení jednotek Octavia II rv. 2004-2008.